Quadcopter drone principle and assembly process
if you don't want to spend much cost for a completely Quadcopter drone ,this artical will let you know how to DIY a Quadcopter drone yourself.
Hardware composition
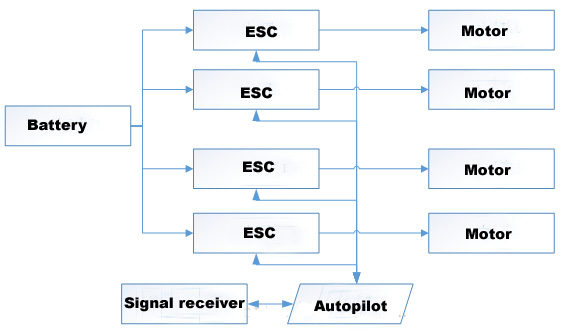
1 quadcopter frame, 4 propellers, 4 motors, 4 ESCs, 1 signal receiver, 1 flight control board, 1 voltage regulator module, 1 battery

quadcopter frame:quadcopter frame KIT FDHI412 quadcopter frame is a long flight time four axis carbon fiber drone Frame , The arm of FDHI412 is pluggable, both the cover and arms can be locked with the quick locking hooks. Due to its detachable arm the FDHI412 drone Frame is also easy to carry.FDHI412 can be applied in many fields like aerial photography, emergency rescue, reconnaissance mission, power line inspection, remote sensing survey and mapping etc.

Propellers: All four propellers must provide lift, and at the same time, the spin of the propellers must be offset, so forward and reverse propellers are required, that is, the diagonal propellers rotate in the same direction, and the same direction. Adjacent paddles rotate in opposite directions, so do the opposite.
 Brushless Motor:
Brushless Motor: kv of the motor: 1v voltage, idling speed of the motor per minute. The smaller the kv value, the greater the turning force. The motor is matched with the propeller: the larger the propeller, the greater the rotational force and the smaller the required rotational speed, which can provide sufficient lift, so the larger the propeller, the smaller the kv value of the matching motor.
 ESC:
ESC: Convert the control signal of the flight control board into the current, control the speed of the motor, and supply power to the flight control board. The ESC changed the 11.1v voltage provided by the battery to 3.3v to power the flight control board.
 Signal receiver:
Signal receiver: Receive the signal from the remote control and give it to the flight control board. Powered by the flight control board.
 Remote control:
Remote control: Need to control pitch (y-axis), yaw (z-axis), roll (x-axis), throttle (height), at least four channels. The remote control is divided into American hands and Japanese hands. American hand throttle (the joystick does not return automatically), yaw to the left, pitch, and roll to the right.
 Flight controller:
Flight controller: Control the flight attitude of the aircraft through a gyroscope in 3 directions and a 3-axis acceleration sensor.
2.Flight principle
1.1 PID control (P: Proportional control I: Integral control D: Differential control):
Proportional control: Amplify the error input by the controller according to a certain proportion
Integral control: However, the system in the steady state will also have a certain error. In order to eliminate the error in the steady state, the error in the steady state is integrated over time. The integral term will tend to 0 as the time increases, so the integral decreases. Steady-state error
Differential control: predicts the trend of the error change according to the change rate (differential) of the input error signal, avoids the lag characteristic of the controlled object, and realizes advanced control
Parameter adjustment: Constantly adjust the proportional coefficient, integration time and derivative time of the PID controller according to the characteristics of the controlled process
1.2 Principle of movement
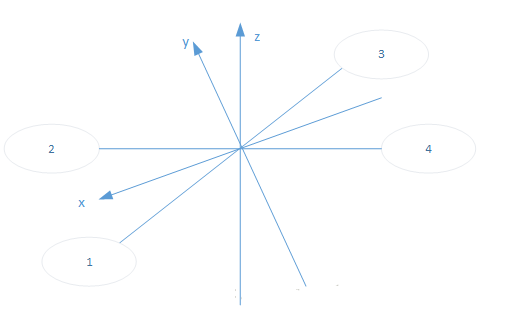
The four-axis rotor is divided into "+" and "x" type. The "+" type flight control board is in front of the rotor, and the "x" type flight control board is in front of the angle bisector. The following figure shows the flight principle of the “x” quadrotor.
Pitch: Rotate around the y-axis, low forward and high climb, 1,2 speed decreases, 3,4 speed increases, pitch is negative
Roll: Rotate around the x axis, the speed of 2,3 increases, the speed of 1,4 decreases, the body rolls right, and the roll value is positive
Yaw: Rotate around the z-axis, assuming 2,4 clockwise, 1,3 counterclockwise, when the speed of 2,4 increases and the speed of 1,3 decreases, the nose is yaw to the right, and the yaw value is positive
Vertical: adjust the throttle size, the speed of the four rotors will increase or decrease at the same time
Pitch yaw roll value analysis:
Pitch: When the positive semi-axis is above the horizontal plane of the coordinate origin (look up), the pitch is positive, otherwise it is negative
Roll: The body rolls to the right as positive, otherwise it is negative
Yaw: right yaw of the nose is positive, otherwise it is negative